個人積分:1分
文章編號:48669559

個人積分:9548分
文章編號:48672084

個人積分:247分
文章編號:48673189


個人積分:9548分
文章編號:48719528
個人積分:6分
文章編號:48749389
這篇是研究生提供的
點此連結
個人積分:0分
文章編號:48759451
個人積分:9548分
文章編號:48809242
很多朋友PM詢問一些設定及飛控問題..我就來統一說明一下..
我用的遙控器是 DEVO-10 是10動的遙控器, 使用的接收機是RX-1002也是10動的接收機..
也就是說..我可以控制10個不同的通道, 如果每個通道都接一個燈, 那我就可以分別控制10個燈, 而遙控器有些是推桿, 有些是開關.. 其實都是一樣.. 在DEVO10每個通道(每一動)所送出的值在遙控器裡是-100到100(也可以擴展), 而開關可以分別設定 不同的狀態對應不同的值.. 類比搖桿也可以設定不同的曲線以達到不同的操作感覺..
而接收機就是接收遙控器的訊號, 再把遙控器的動作輸出.. 看是輸出到飛控或是其它被控制的裝置.
我的JET450的接法是..
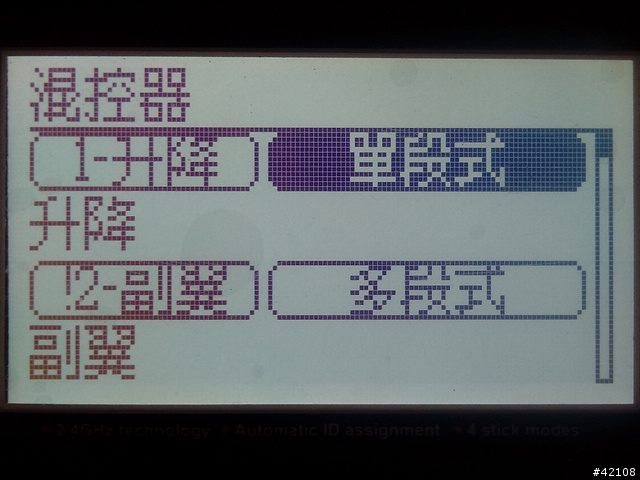
CH1(升降, ELEV, 在四軸上是往前飛/往後飛)--> NAZA-M的 E點
CH2(副翼, AILE, 在四軸上是往左/往右移動)--> NAZA-M的 A點
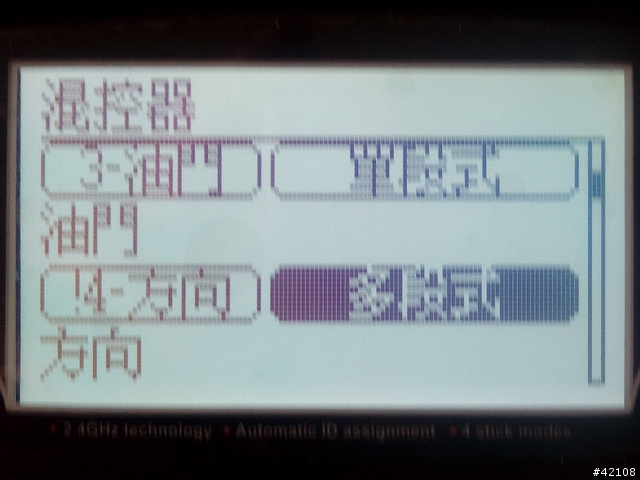
CH3(油門, THOR, 在四軸上是往上升/往下降)--> NAZA-M的 T點
CH4(方向, RUDD, 在四軸上是往左轉/往右轉)--> NAZA-M的 R點
以上四個是基本, 所以不能亂改
DEVO10上的混控設定如下:(通道名稱有!符號代表反向輸出, 因為不是所有通道輸出都是左小右大或下小上大的, 如果發現相反就要讓它反向輸出, 不然你搖桿往前打, 結果飛機往後飛, 那就很怪了)
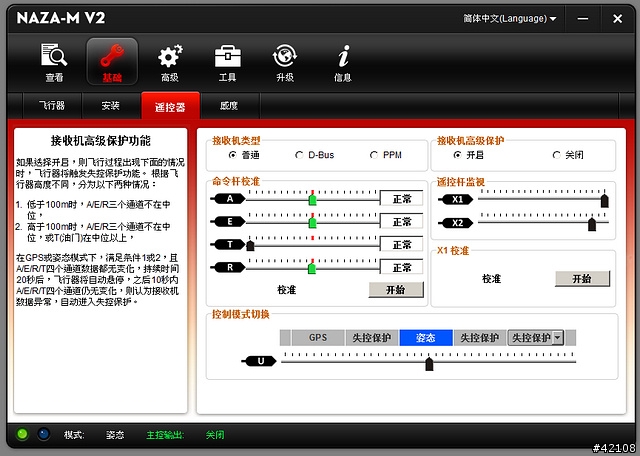
CH5(起落架, GEAR) --> NAZA-M的 U點
這個我是拿DEVO10上一個三段開關(MIX)分別送出3個不同的值(這些值是直接測試出來的),
MIX0讓NAZA-M停在GPS姿態模式(我常用的)
MIX1讓NAZA-M停在姿態模式
MIX2讓NAZA-M停在失控保護模式(這個模式我在NAZA-M設定是返航並降落, 所以當成是一鍵返航功能)
就是下圖的U那一個模式
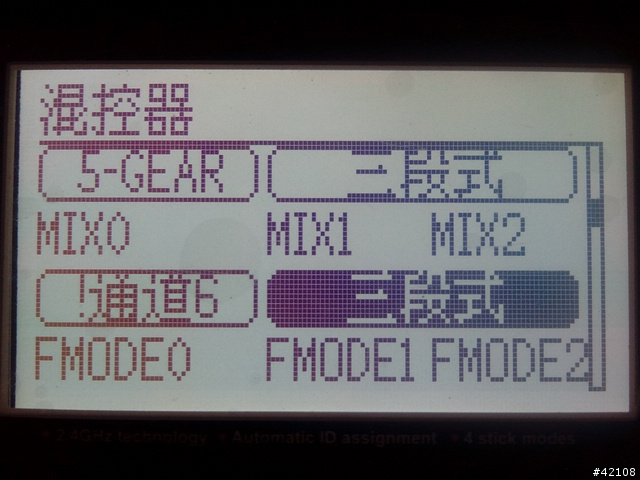
CH6 --> NAZA-M的 X2點
這個我拿來控制智能方向, 使用另一個三段開關(FMODE)一樣送出3個不同的值.
FMODE0 讓 NAZA-M 停在關閉
FMODE1 讓 NAZA-M 停在航向鎖定(不管機頭方向, 只要往前推飛機就往前飛)
FMODE2 讓 NAZA-M 停在 返回點鎖定 (不管飛機在哪裡, 只要往後拉飛機就會往返回點靠近)
設定如下圖一樣

混控器設定可以看出都是三段式的
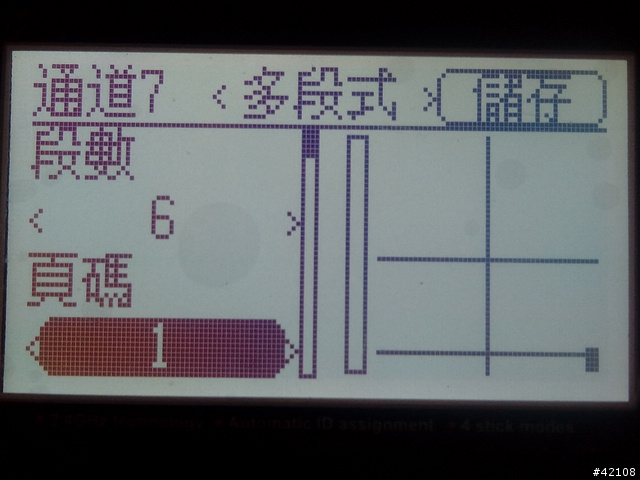
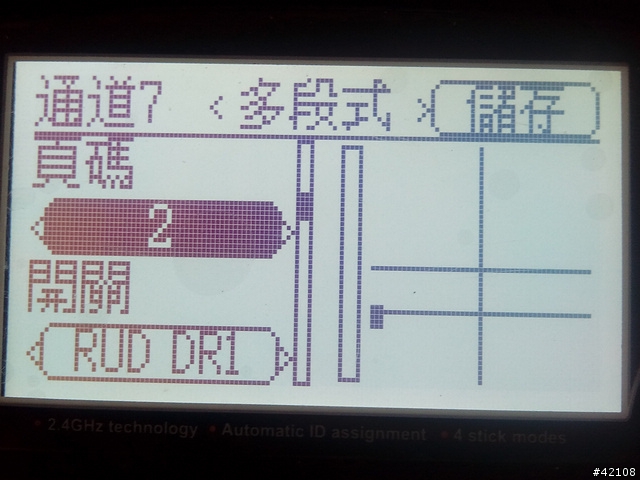
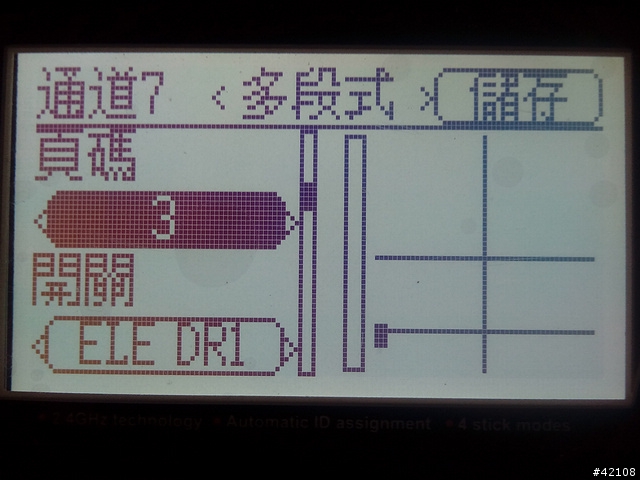
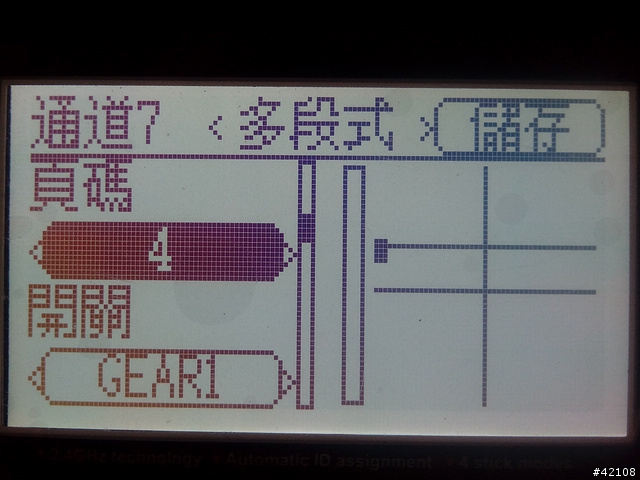
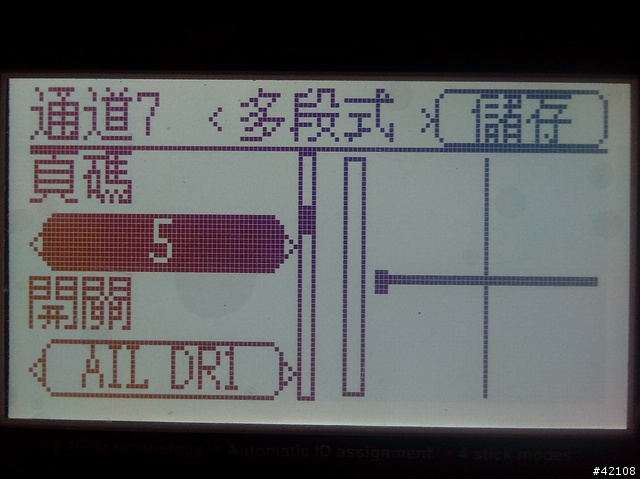
CH7 --> LED控制器
這個我用5個開關 AILE D/R開關, RUDD D/R開關, ELEV D/R開關, GEAR開關, 和MIX開關
讓它有
所有開關都在0的位置(MIX在1或0)-->關閉
RUDD 1-->呼吸燈+四燈爆閃,
ELEV 1-->吸吸燈+四燈爆閃, 前2燈恆亮
GRAR 1-->逆時針 四燈輪閃
AILE 1-->順時針 四燈輸閃
MIX 2-->四燈全亮 (因為MIX2一樣有一鍵返航功能)
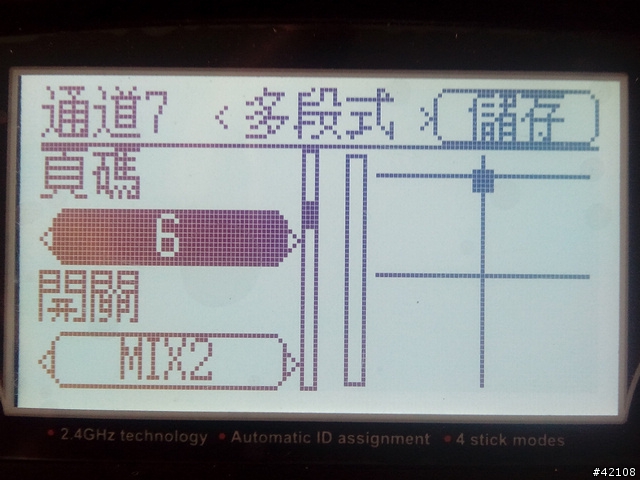
和CH8的混控設定..

CH7的混控裡的細部設定(可以看出右方帶有粗點的橫線有不同的位置, 就代表由CH7輸出的數字不同)
CH8 --> 二軸雲台的左右傾角控制(下圖的 A1點)
CH8我用遙控器的 AUX4(左旋鈕)來控制
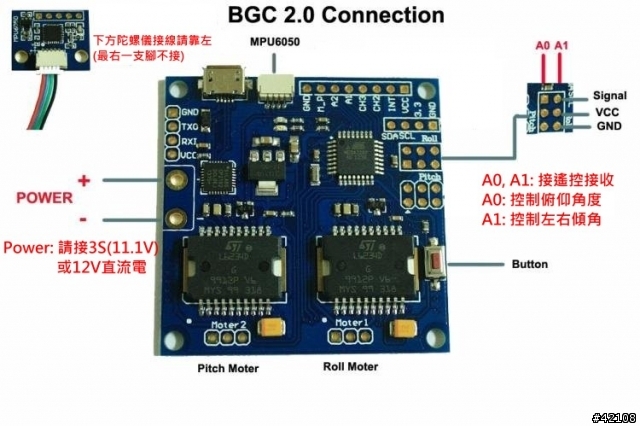
CH9 --> 沒接
CH10 --> 二軸雲台的俯仰角控制(上點的A0點)
CH10我是用DEVO10的AUX5(右旋鈕)來控制
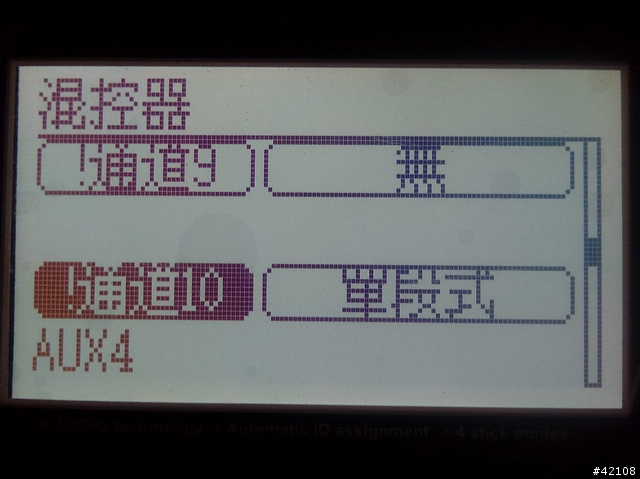
CH9/10的混控設定
以上看起來很複雜..其實理解之後..就非常簡單..
有沒有發現 CH2副翼 和CH4方向..我設成多段式..
因為我把這2個都設定成2個段落, 正常用搖桿控制 左右移動(CH2)和左右轉動(CH4).
而當我把 AILE D/R開關切到 AILE 1時, CH2和CH4會各固定輸出一個值(此時搖桿沒用), 這2個值會讓我的飛機鏡頭對著一個目標物盤旋(不過這2個值還沒調好, 會變成螺旋狀盤旋
 ), 不過代表混控是很好用的..
), 不過代表混控是很好用的..當然..前提是 DEVO10必須是刷 Deviation 韌體才行, 原廠韌體是做不到的..

個人積分:39分
文章編號:48810357
個人積分:7分
文章編號:48816356
個人積分:9548分
文章編號:48819353

































































































