
OK~"始大抖".....
把之前很久沒在用的螳螂車拆了~

先假組一下看一些東拼西湊的零件有沒有辦法合,結果還是免不了要擴挖一些洞~
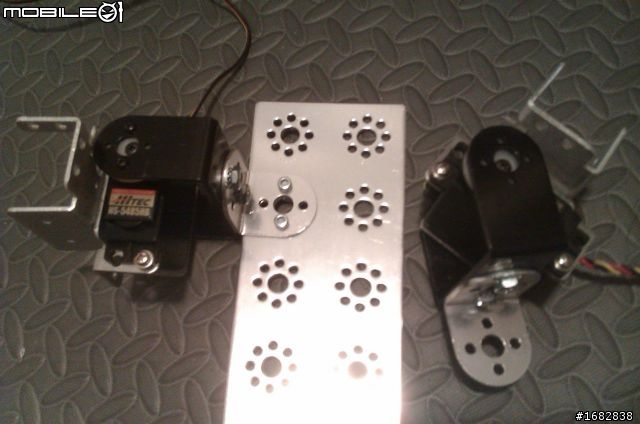
這次用到的新零件是這種轉盤,做關節用的(這東西中文怎麼說阿??)

轉盤組好鎖上和骨架的連結片...

搭上骨架...有點足部的雛型~

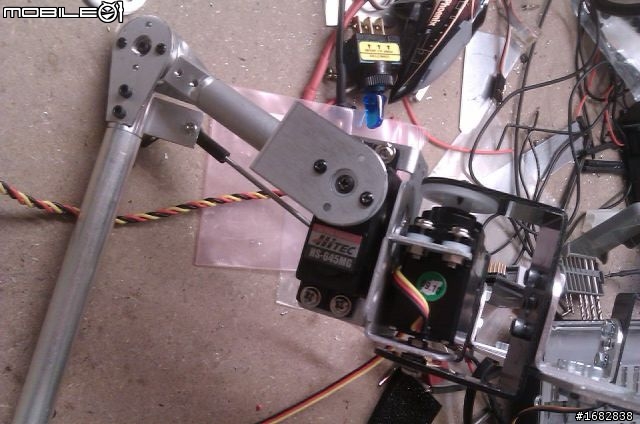
這是用朋友的搖控車殺肉下來的鐵架做平行足部用的平衡架~省伺服器就靠它了~

因為鐵棒不夠長~所以用那鐵片做沿伸,這裡的步驟真的就"魔鬼都在細節裡",也不知道怎麼解說,總之做第一隻腳時拆拆裝裝的做好多重覆的動作~很多地方都鬆掉得換零件才弄好~接下來的三隻就會很好做。

把兩顆伺服機裝上~靠身體內部的伺服機不需撐太多力,用HITEC-485的就好~抬腳那顆就要大一些,用HITEC-645的比較夠力些~
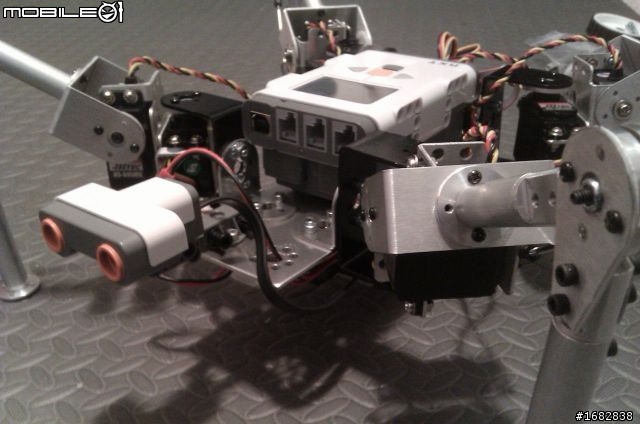
把NXT主機擺進去看看,空間剛好夾住~

然後依樣畫葫蘆的把剩下三隻都裝上去~其實我有習慣把伺服器的角度訂在1500,也就是90度左右的中間位置,這樣以後寫程式比較好抓~

後面裝了HITECHNIC出的Servo Contrller剛好有八組控制來操作伺服器。

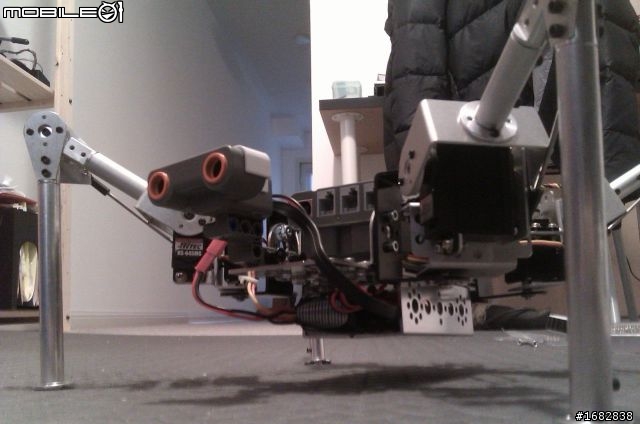
整個裝起來大概就長這樣~

前面還是用標準的超音波測距來當頭~~

中間有多空的位置有點醜,之後再想看看怎麼改好了~
外接電池部份就放機腹下的空間,用了一顆2S的中型鋰電...
以上~~~~~~
其實還沒有真正完成啦~~改天再去特力屋或五金行找椅角的橡皮墊和擴張一下腳盤範圍來增加穩定度。不過說真的我有測一下簡單動作,支撐的紮實感還是用一腳三顆伺服器比較穩的感覺~也許是我這樣的設計還不夠好,改天再加強一下了...然後~~NXT本身的程式軟體和Servo Controller的library有點遲頓和小BUG,所以我改用ROBOTC的FIRMWARE寫比較快一些~僅供參考~~
































































































