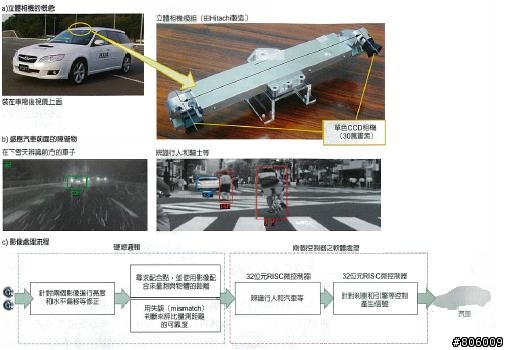
富士重工(Fuji Heavy Industries)根據使用立體攝影機所量測的汽車/行人及其他物體的距離來控制煞車和加速等技術稱為主動駕駛輔助系統(Active Driving Assist, ADA).
單單利用立體影像辨識的技術所判斷的距離要能達成汽車行駛所需的高度可靠性, 目前還沒有其他製造商能發展到結合煞車控制或其他汽車功能的程度, 此技術富士重工已研發20多年, 並已進入商業應用階段(預計會於2009年開始應用在Subaru商用車上), 此技術可取代微波雷達偵測式的系統, 在系統成本上可降低一半(20萬日元以下).
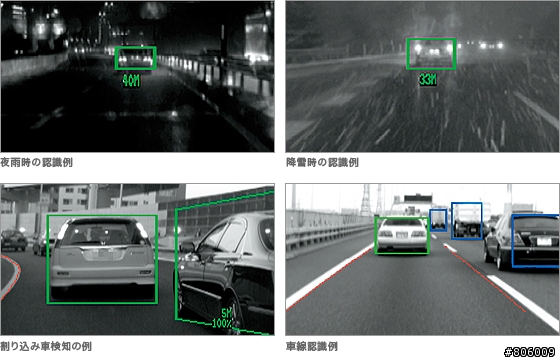
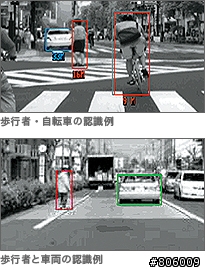
該系統是以兩部攝影機所形成的立體影像來克服以單攝影機來量測汽車的前障礙物距離時, 在能見度不良的狀況下所造成的影響(現行的作法是搭配微波雷達來克服), 目前技術發展到在惡劣的氣候條件下(下雨/霧/下雪...), 測量距離都可以達到0~100公尺(足夠應付台灣最高時速100公里, 但以歐洲最高時速200公里最少要達到200公尺),
立體攝影的影像辨識與距離測量技術的關鍵在於如何讓兩部攝影機必須辨識出同一個物體, 特別是降低在惡劣的氣候條件下同一物體辨識上的失誤, 為此富士重工在設計上採用兩組平行計算的電路, 一組是計算距離, 另一組是計算失誤的判斷(參考ADA系統架構), 失誤的判斷原理, 依據兩台攝影機在同一區所拍的影像亮度差異, 如果差異絕對值在假設範圍內系統會判定無誤, 假設目標物體的區域是以4*8pixel作比較, 區快越大比對速度快但精準度會下降.
ADA的系統架構
實測的影像