1. 前言 (就是本篇1F).
2. 週邊配件(一)...第9樓
3. 週邊配件(二)...第13樓
4. JET680H4完工囉...第23樓
5. JET680H4細部照...第33樓
6. JET680H4試飛...第68樓
7. JET580U完工試飛...第89樓
8. JET550X6完工/試飛...第92樓起
9. JET550X6改用小蟻運動相機...第102樓
年初, 發了一篇文章記錄我在無人四軸空拍機的一路跌跌撞撞的歷程(請參考: 我的四軸空拍夢全記錄 ). 一路由玩具四軸,到品牌四軸(QR X350),到商業飛控(NAZA-M V2)最後終進入了很多人覺得太複雜的開源飛控APM.
在使用APM飛控以來覺得它的功能已經比之前強的太多了..舉凡地面站, 自動航點飛行, 自動跟隨飛行等等.. 但人心是不滿足的..
是的..APM因為使用8位元的CPU..到目前來說已經把它CPU的效能幾乎搾光..因此有硬體廠商依循APM的開源基礎使用32bit ARMCPU做為新的核心發表了PX4飛控, 但因為PX4的功能設定太多, 除了CPU主板之外, 可依功能疊加不同的硬體模組.. 弄得比較複雜..因此雖然出現已經一段時間, 但一直沒有影響APM的飛控地位.
所以..APM的原開發廠 3DR也意識到了APM的效能問題..於是..也採用32bit的CPU..設計出完全相容APM. 但又可以加入更多新功能的新一代的開源飛控 Pixhawk..就這樣誕生了..
也這樣..當時當我把我全機出清之後... 就鎖定Pixhawk要當成我下一台無人空拍機的飛控系統.. 也才新開了這個討論串來做新一代JET680無人機的點滴記錄..
好..廢話說太多..Pixhawk到底有什麼高明之處呢..
首先.. 我們把飛機飛上去最怕發生什麼事......沒錯..提控.. 飛機飛走..還算小事.. 萬一掉下來傷到了人..才真的是不該發生的事..對吧..
那..為什麼會提控.. 不外乎 GPS, 羅盤, 秀斗了, 陀螺儀, 加速器故障了..很多原因..對吧..
因此 Pixhawk具有容錯和備援的功能.. 它裡面一堆感測器都是兩套.. 連CPU都2個..(不是雙核心哦, 是2顆CPU). 一顆掛了..另一顆馬上接替工作..
GPS是外接...對..它可以接2顆GPS...一顆抓不到星星..另一顆馬上接替上來(預設只要星星多2顆以上那一個為主)..
羅盤外接1個..主機版上也有1個.. 2個羅盤都會運作..當2顆羅盤資料明顯不同(1顆說目前往北, 1顆說往東)..那就會照設定好的程序來處理..
3D加速器, 陀螺儀..是的..都是2套..一套使用一套備援..
怕有問題自動降落時打到人..可以加上聲納模組..降落時可以自動避開..
而且飛行的運算更快速, 可以放進來更多更複雜的運算方式來達到想要的需求(以目前最新測試版3.3來說..就加入了地形避障功能, 把目前所在的地形圖由地面站傳給飛控, 在做飛行時如果飛控發現目前高度可能會撞山或撞建築物, 那麼飛機會自動爬昇或轉彎, 以免撞上..)..
因此..在開始收集零件的同時..我的下一台無人機要的是什麼..
記得我的JET650v3出清的原因之一是太大台, 有收和沒收沒什麼兩樣... 開車才能載出門..
但又貪圖大四軸的穩定性和抗風性... 於是這次鎖定了 H4機身.. 同等於X4的680軸距(所以叫JET680), 收起來很小(如圖, 目前機架還沒到).
![[分享] 新世代Pixhawk飛控之六軸空拍機-JET550X6誕生全記錄(持續更新中)](http://attach.mobile01.com/attach/201409/mobile01-318265d92af3a08e5ee8b2740a46bc39.jpg)
![[分享] 新世代Pixhawk飛控之六軸空拍機-JET550X6誕生全記錄(持續更新中)](http://attach.mobile01.com/attach/201409/mobile01-dc4c8225e0bd2bbda02cf7f8f6ed20cf.jpg)
而飛控不用說..當然就是Pixhawk了..也找了好久.. 比了又比.. 看了又看..不是外殼太醜..就是沒附什麼配件(還要一個一個去買). 終於找到了一家口碑還不差, 送的又很大方(電源模組, LED, I2C, 喇叭, 解鎖開關...都送). 還是使用和原廠一樣的DF13端子座.
不過賣家有說.. 如果線材不處理就直接插進去..那麼..就很難拔起來了..好處是很可靠..但如果想更換線材就頭痛了.. 因此我就按照賣家教的方法先對插頭做點小處理, 把卡筍先切掉..就可以插拔..但也是很緊, 不會鬆脫啦...
全員集合, 附了還不錯的MicroSD卡, ...XD, 少拍了電源模組
![[分享] 新世代Pixhawk飛控之六軸空拍機-JET550X6誕生全記錄(持續更新中)](http://attach.mobile01.com/attach/201409/mobile01-6396f5f522e48d6bca3872423db7b68d.jpg)
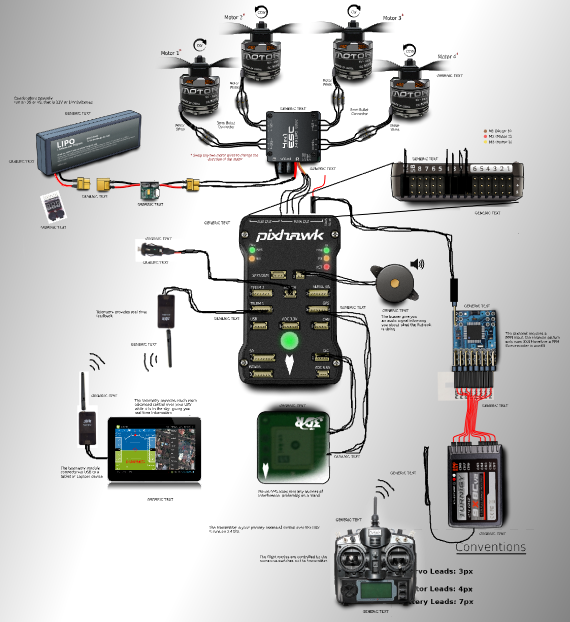
由左到右依序是 LED/USB外接模組, I2C擴展板(共可以接4個I2C裝置, 如羅盤, 外接的LED燈也算1個), 8通道 PPM編碼器(因為Pixhawk只接受PPM的遙控訊號, 因此傳統接收器, 如RX1002這類就需要先轉成PPM訊號再接入Pixhawk飛控)
![[分享] 新世代Pixhawk飛控之六軸空拍機-JET550X6誕生全記錄(持續更新中)](http://attach.mobile01.com/attach/201409/mobile01-ee2728f5d0fc226678b264c61440169a.jpg)
附的解鎖按鈕是帶燈的哦..也和原廠一樣..
![[分享] 新世代Pixhawk飛控之六軸空拍機-JET550X6誕生全記錄(持續更新中)](http://attach.mobile01.com/attach/201409/mobile01-96d18786f3b5fac38a841bdf3f7c7486.jpg)
而OSD和數傳則是延用之前要買給X350pro用的(只要換一下接線..不難). 目前看來一切正常..
![[分享] 新世代Pixhawk飛控之六軸空拍機-JET550X6誕生全記錄(持續更新中)](http://attach.mobile01.com/attach/201409/mobile01-ceabfd59457c48a4dbea9730f7b69fd3.jpg)
![[分享] 新世代Pixhawk飛控之六軸空拍機-JET550X6誕生全記錄(持續更新中)](http://attach.mobile01.com/attach/201409/mobile01-d7f3bee185e8b775206e353f71edc1d8.jpg)
接下來就等機身, 電變, 馬達到貨囉..

未完...續待...