fatfellow wrote:
不值得浪費我的時間
不要在浪費我的時間跟版面空間
你都說我是小丑了 , 我到是很享受 有人 氣噴噴地


fatfellow wrote:
沒有 stereo vision 你怎樣去量物件的距離跟大小?
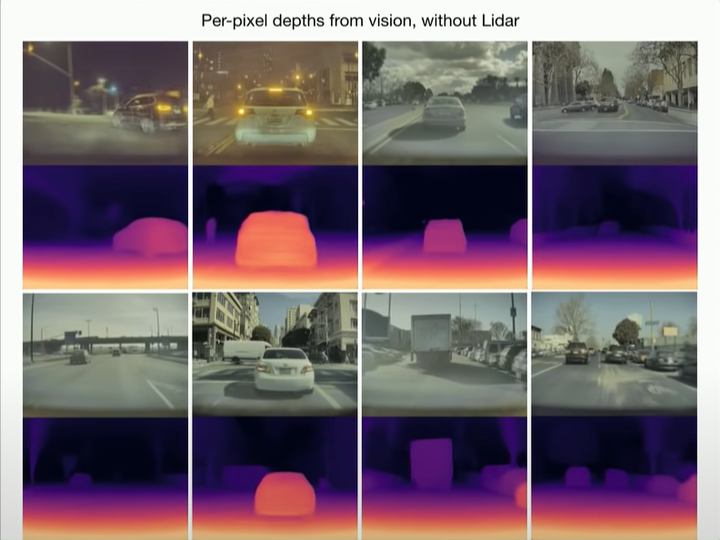
小人物櫻木 wrote:
請參考《Autop...(恕刪)
306XR wrote:
我只看到了用鏡頭方案(恕刪)

































































































